Self-balancing robot
Project description
A self-balancing robot is a well-known problem in the world of Control and Robotics. The robot has to autonomously control its two wheels in order to keep its balance.
The goal of this project was to go through all the steps of a typical design project. Modeling, equations, simulation in SIMULINK, design of a PID controller, implementation on Arduino, as well as choice of a design, creation of the prototype and testing.
This project was started as part of my 3rd year Project class, and completed with classmates once the class ended.
Technologies Used: Simulink, PID Controller, Arduino(C), Catia
Demonstration
Video demonstration
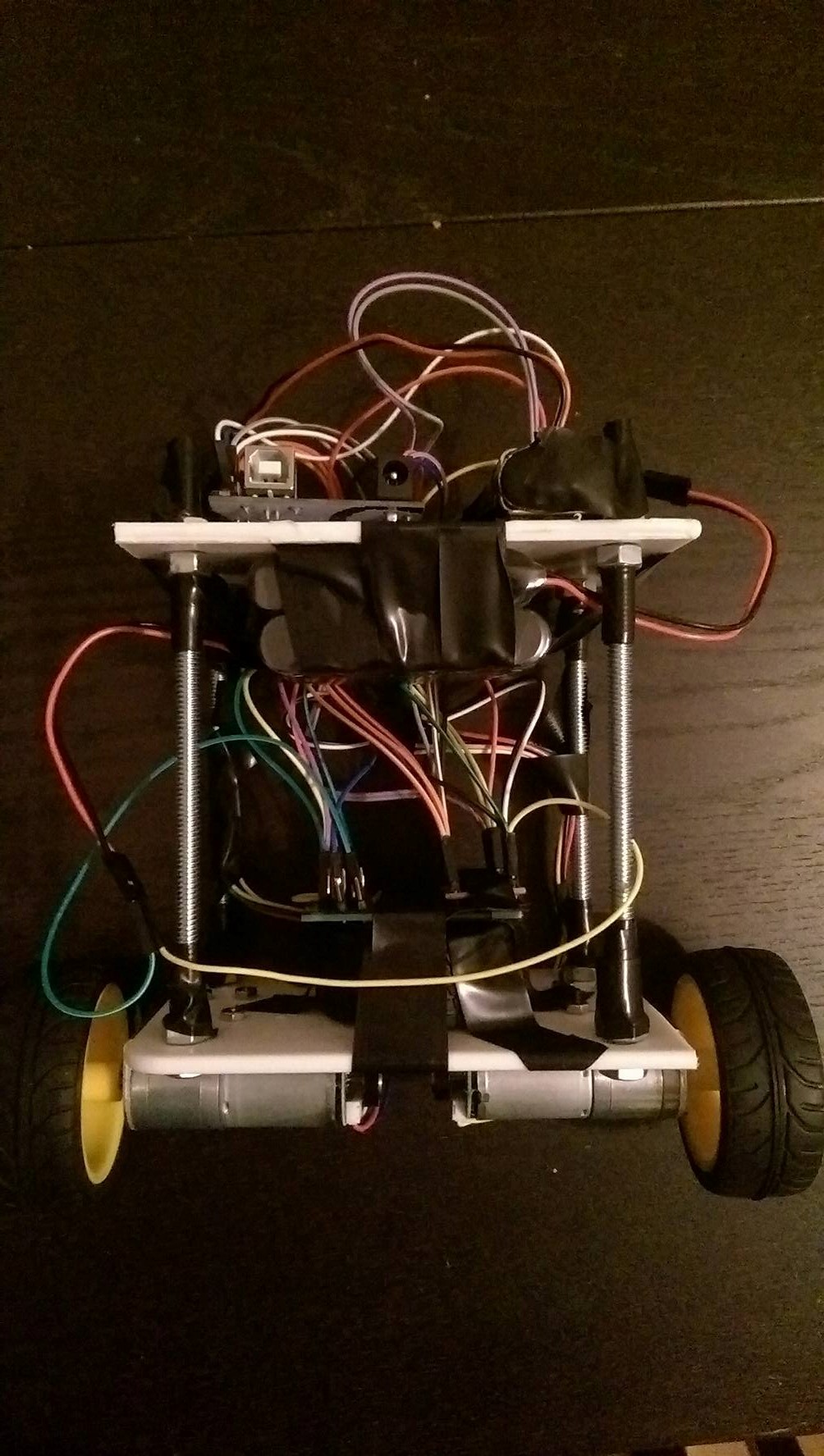
Initial prototype
Schematics & free-body diagram
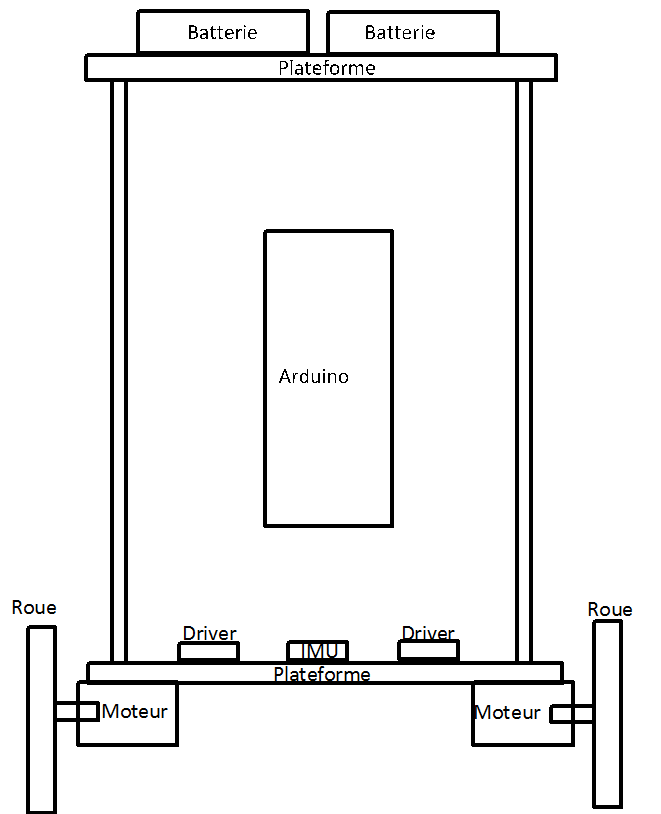
Simplified robot schematics
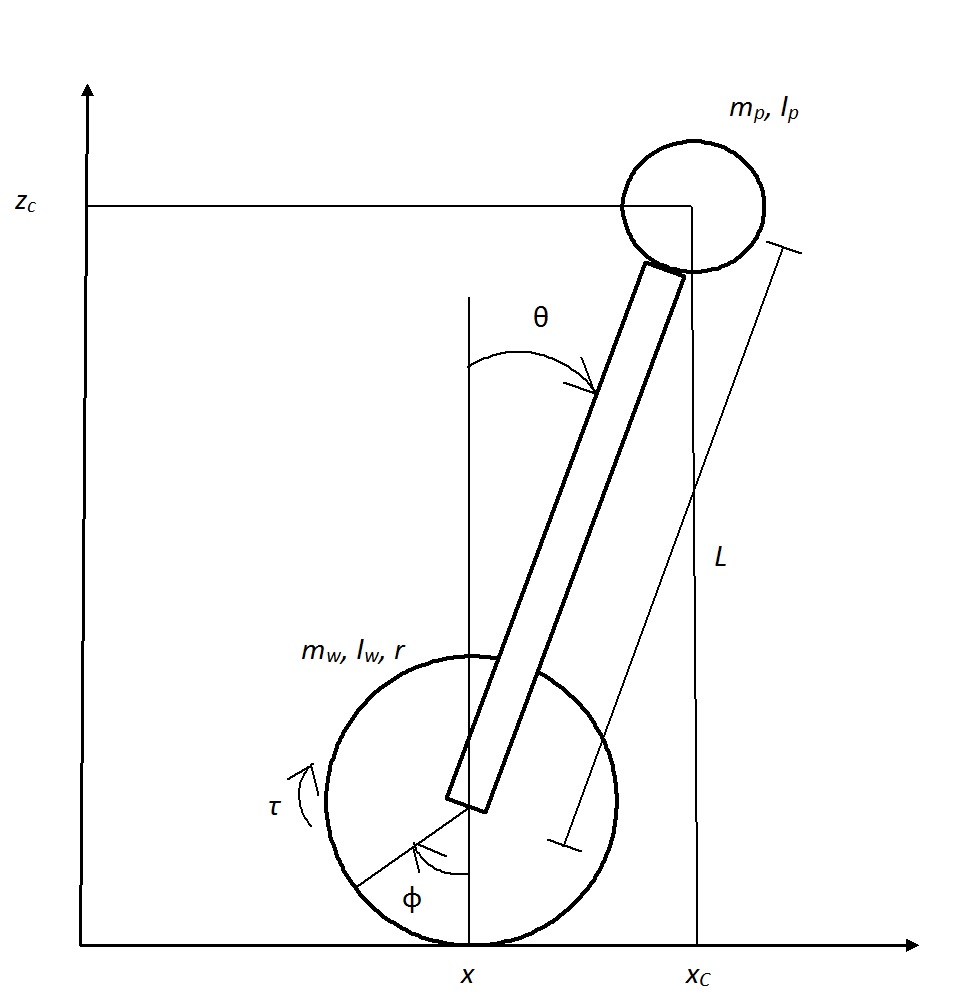
Simplified free-body diagram