Autonomous feeding system for people with upper body disabilities
Project description
The goal of my M.Sc. was to develop a proof of concept for an autonomous feeding system for people with upper-body disabilities.
The proposed solution combines classical robotics concepts with modern techniques, such as computer vision and pathplanning with ROS.
Due to COVID-19, I was unable to implement the system on a real-life robot arm so everything was done with simulation.
Technologies Used: Robot Operating System (ROS), Kinova MICO arm, Faster RCNN (computer vision), pointclouds with Intel D415 stereo camera, Python, C++
Demo
Video demonstration
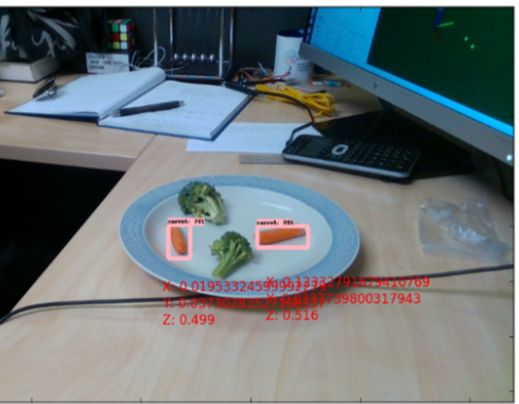
Computer vision: detecting food in a plate in 3D
Given an image from the stereo camera, the system is able to find the 3D position of food in a plate

Obstacle avoidance
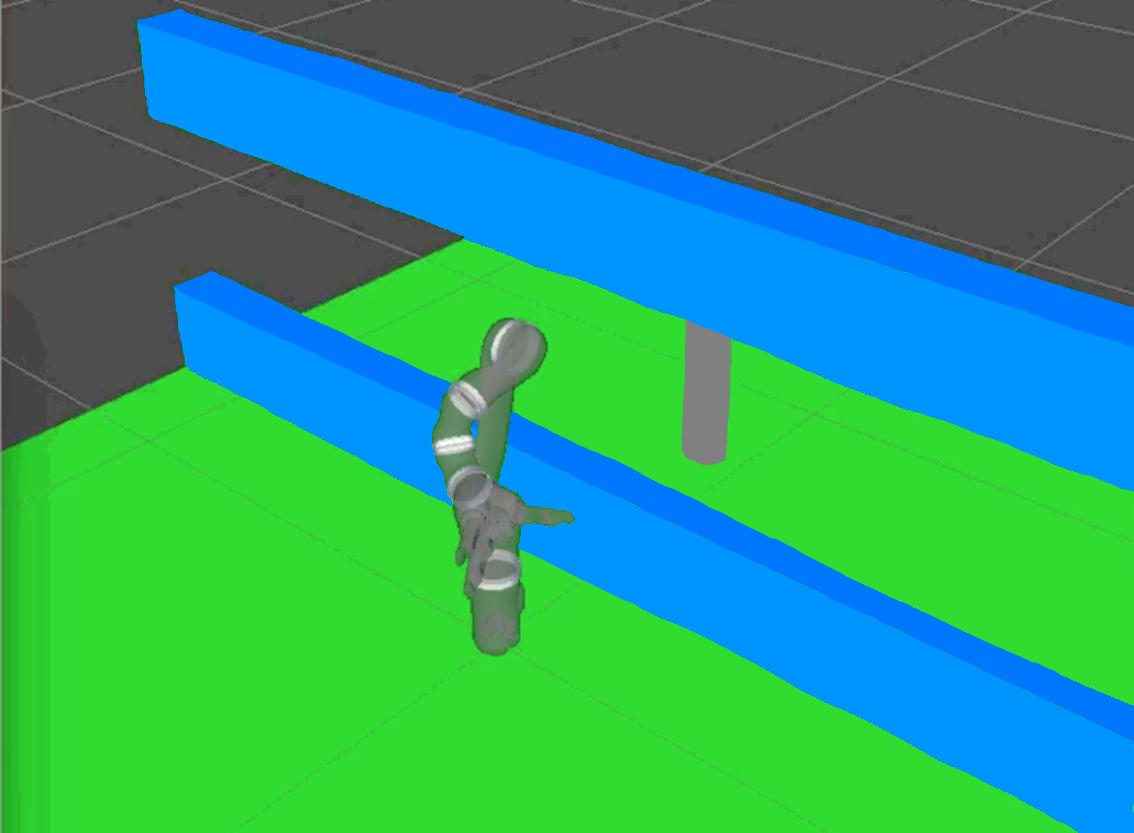
An example of a complex obstacle handled by the system. The goal is to grab the cylinder on the other side of the obstacle.